

طراحی و ساخت ربات انساننما، یکی از فناوریهای در حال رشد در سطح جهانی میباشد، که تاکنون دانشگاهها و صنایع مطرح دنیا پیشرفتهای زیادی در این حوزه داشتهاند. هدف از طراحی، ساخت و هوشمندسازی این نوع رباتها، استفاده از آنها در موقعیتهای کاری حساس و دشوار به جای انسان یا به عنوان همکار در کنار انسان میباشد. کاربرد بخشهای مختلف بدن ربات انساننما، در قسمتهای مختلف صنعت، آن را به موضوعی کاربردی و جذاب برای صنعت و دانشگاه تبدیل نمودهاست. این امر، سبب مطرح شدن این فناوری روز دنیا، در ابعادپروژههای ملی گشته است.
فناوری ربات انساننما، سابقهای چندین ساله در کشورهای پیشرفته دنیا دارد و در ایران نیز تاکنون تیمهای تحقیقاتی متعددی در حوزه طراحی و ساخت رباتهای انسان نما فعالیت کردهاند. این رباتها که گهگاه در مسابقات رباتیک و جشنوارههای علمی پژوهشی نمایش داده میشوند، عمدتاً در ابعاد کوچک بوده و پیچیدگیهای دینامیکی رباتهای انسان نما با ابعاد بزرگ را ندارند. طراحی، ساخت و هوشمندسازی ربات انسان نما با ابعاد و وزن نزدیک به انسان، که قابلیت انجام رفتارهای دقیق و نرم مشابه رفتارهای انسانی را داشته باشد، هدف اصلی پروژه سورنا بودهاست. پروژه سورنا که هماکنون نسل سوم آن در حال تکمیل است و تاکنون نسلهای اول و دوم این ربات به بهرهبرداری رسیدهاست، توسط مرکز سیستمها و فناوریهای پیشرفته دانشگاه تهران(CAST) طراحی، ساخت و پیادهسازی شدهاست.
سورنا I
تیم مرکز سیستمها و فناوریهای پیشرفته دانشکده مهندسی مکانیک پردیس دانشکدههای فنی دانشگاه تهران، با همکاری انجمن تخصصی مراکز تحقیق و توسعه صنایع و معادن و با دستیابی به دانش و فناوری طراحی، ساخت و برنامهریزی رباتهای انساننما، اقدام به طراحی و ساخت ربات انساننمای سورنا ۱ نمود. سورنا ۱ تنها به عنوان نمادی برای اعلام آغاز پروژه طراحی، ساخت و هوشمندسازی ربات انساننما، در سال ۱۳۸۷ ارائه شد. این ربات ۱۶۵ سانتیمتر قد و ۶۰ کیلوگرم وزن دارد و از قابلیت حرکت بر روی مسیر از قبل تعیین شده توسط موتورهای DC و سیستم مسیریاب و همچنین، حرکت و فعالیت به صورت دستی از طریق اپراتور برخوردار بودهاست. علاوه بر این، سورنا۱ قابلیت تکلم متنهای از پیش تعیین شده (در تمامی مراحل فعالیت) را نیز دارا بودهاست. سورنا ۱ در روز ۲۴ آذر ماه ۱۳۸۷ در همایش انتخاب نوآوران برتر کشور رونمایی شد. نامگذاری این ربات بر اساس نام سردار اشکانی، سورنا انجام گرفتهاست.
مراسم رونمایی، 24 آذر 1387 ، مرکز همایش های بین المللی صدا و سیما
 |
 |
 |
سورنا II
در راستای تکمیل و توسعه ربات انساننمای سورنا ۱، مراحل طراحی وساخت نسل دوم ربات سورنا مجدداً در مرکز سیستمهای پیشرفته دانشگاه تهران آغاز گردید. این ربات که در ابعاد و وزن مشابه انسان ساخته شدهاست قادر است همانند یک انسان ولی با سرعتی آهستهتر و با ترکیبی از حرکات دست، سر و پا گام بردارد. داشتن مجموعاً ۲۲ درجه آزادی در بالاتنه و پایینتنه و گام برداشتن با حفظ تعادل از ویژگیهای بارز این نسل از ربات سورنا محسوب میشود. سورنا ۲ محصول بیش از ۱۰۰۰۰ نفر ساعت کار فشرده میباشد. مشخصات فنی سورنا ۲ در جدول زیر آورده شدهاست.
| مشخصات سورنا۲ | توضیح |
|---|---|
| قد | ۱۴۵ سانتیمتر |
| وزن | ۴۵ کیلوگرم |
| درجات آزادی | ۲۲ درجه (۱۲ درجه پائین تنه، ۸ درجه دستها و ۲ درجه سر) |
| مکانیزم حرکت | گام برداشتن با حفظ تعادل |
| سیستم کنترل | MIMO Stable Control System |
| پردازندههای داخلی | میکروکنترلرهای AVR, DSP |
| سیستمهای محرک | موتور DC، سروموتور، هارمونیک درایو و گیربکس سیارهای |
| سنسورها | Gyroscope, Accelerometer, Force Sensors, Pan and Tilt Sensors |
| تجهیزات جانبی | دوربین، میکروفن و speaker |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
کسب رتبه جهانی
ربات انسان نمای «سورنا» در ردیف پنج ربات صاحب نام دنیا قرار گرفت.
بزرگترین انجمن حرفهای دنیا به نام IEEE با تحلیل رباتهای پیشرفته دنیا، نام سورنا را در ردیف پنج ربات صاحب نام دنیا قرار داد. این انجمن طی گزارشی رباتهای مطرح دنیا: (Asimo) از ژاپن، (Reem-B) از اسپانیا، (Justin) از آلمان، (Charli) از آمریکا و (Surena) از ایران، را مورد تحلیل، بررسی و مقایسه قرار داده است.
جدول رتبه بندی 5 ربات صاحب نام دنیا در IEEE
| رتبه | نام ربات محصول کشور |
| اول | Asimo ژاپن |
| دوم | REEM-B اسپانیا |
| سوم | Justin آلمان |
| چهارم | CHARLI ایالات متحده آمریکا |
| پنجم | SURENA 2 ایران |
IEEE بزرگترین انجمن حرفه ای دنیا است که در زمینه فعالیتهای نوآورانه و تکنولوژیک با گرایش الکترونیک فعالیت میکند.این نهاد علمی در آمریکا مستقر است و دارای ۴۰۰هزار عضو در بیش از ۱۶۰ کشور و ۹۰هزار دانشجو در در ۸۰ کشور جهان است.
انجمن IEEE از سورنا به عنوان «یک توسعه غافلگیرکننده» یاد کرده است. بعد از انتشار اولین گزارش ها، بعضی از اشخاص شک کردند که این ربات چیزی بیشتراز یک بدنه یا پوشش پلاستیکی شبیه Asimo نیست، اما فیلم ویدوئی ثابت کرد که این ربات انساننما، واقعا یک ربات انسان نما است که با سیستم کنترل بازخوردی، میتواند مثل انسان راه برود، به آهستگی گام بردارد، خم شود، بر روی یک پا بایستد و حرکات منحصربه خودش را داشته باشد.
دکتر عقیل یوسفی کما درباره این ربات میگوید: تیم او در حال توسعه سیستم کنترل تعادل دینامیکی این ربات است. این سایت با تشریح ویژگیهای سورنای ۲ ویدئوی راه رفتن سورنا و همچنین عکسهای از مراحل ساخت آن را نیز به همراه خبر منتشر کردهاست. همچنین لازم است ذکر شود که انجمن IEEE اپلیکیشنی با نام Robotsapp برای IPad طراحی کردهاست که در آن به معرفی رباتهای جذاب و پیشرفته جهان میپردازد.
منبع: http://spectrum.ieee.org/automaton/robotics/humanoids/humanoid-robots-rise
ربات سورنا ۲ نیز تنها ربات ساخت ایران است که که در این اپلیکیشن به معرفی آن پرداخته شدهاست. دینامیک غیرخطی، اینرسی بالا و حفظ تعادل و پایداری ضمن حرکت و تغییرات پیکربندی سورنا۲، مباحث سختافزاری و نرمافزاری پیچیدهای را مطرح ساخته است. این چالشها، در طراحی، ساخت و کنترل ربات انساننما با ابعاد بزرگ و وزن زیاد (مشابه انسان)، منجر به استفاده از فناوریهای نوین و منحصربهفرد در سورنا ۲ گردیده است. طراحی مکانیکی بدنهٔ سورنا ۲ به گونهای صورت گرفتهاست که بیشترین درجات آزادی قسمتهای مختلف بدن تأمین گردد. جهت تأمین حرکت روان، با دقت بالا و بدون لقی مفاصل، از هارمونیک درایو استفاده شدهاست. علاوه بر تأمین پایداری به صورت دینامیکی، از سنسورهای فشار در کف پا نیز بدین منظور استفاده گردیدهاست. سر انجام ربات سورنا ۲ در روز ۱۲ تیر ماه ۱۳۸۹ مصادف با روز ملی صنعت و معدن در سالن همایشهای صدا و سیما با حضور جمعی از رؤسا و مقامات دانشگاه و صنایع و معادن رونمایی گردید.
 |
 |
 |
 |
 |
 |
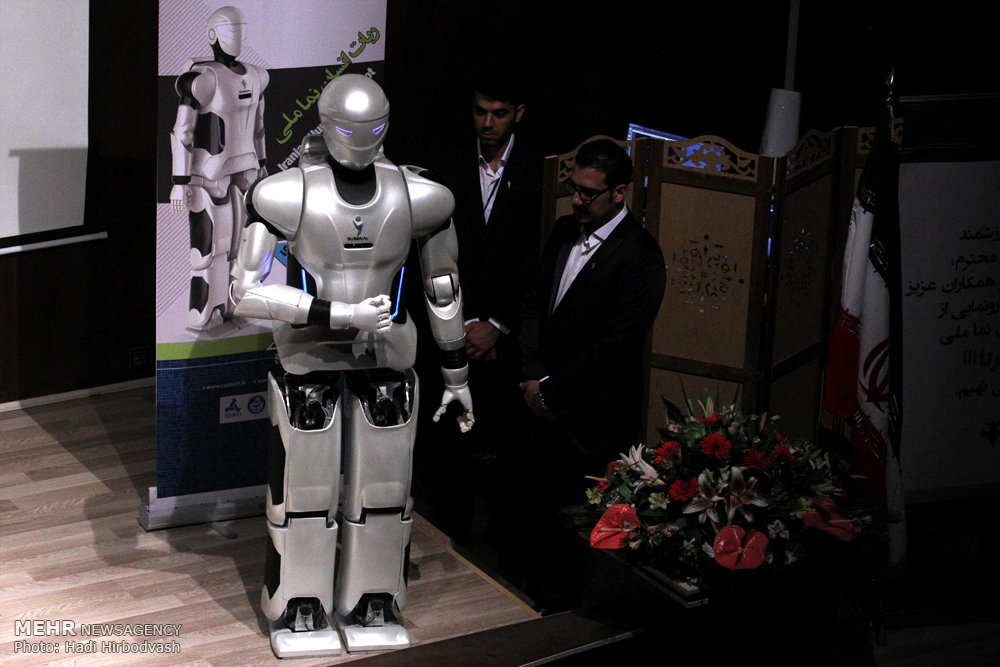
سورنا III
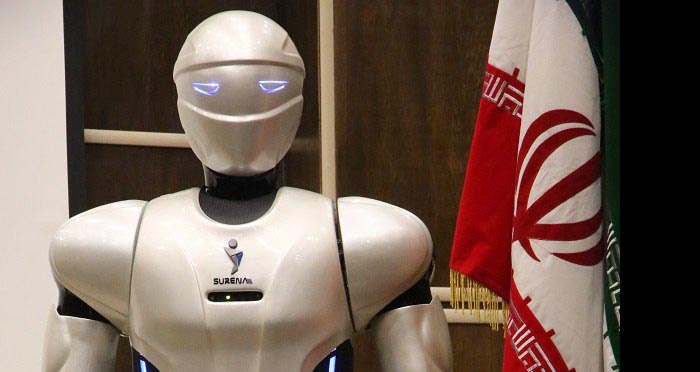
سورنا ۳، نسل سوم ربات انسان نما ملی ایران در مرکز سیستمها و فناوریهای پیشرفته
طراحی و ساخت ربات سورنا ۳ با حمایت مالی سازمان گسترش و نوسازی صنایع ایران در دانشگاه تهران صورت گرفتهاست. مانورپذیری، سرعت گام برداری، هوشمندی و درجات آزادی سورنا ۳ نسبت به نسل گذشته آن پیشرفت چشمگیری داشتهاست. در طراحی و ساخت این ربات از همکاری طیف وسیعی از محققین کشور بهره گرفته شدهاست. پروژه ربات سورنا ۳ در سه فاز انجام گرفتهاست که در فاز اول به طراحی، ساخت و راه اندازی حسگرها و موتورها پرداخته شدهاست. در فاز دوم به حل چالشهای دینامیک و کنترل از قبیل پایداری ربات و افزایش سرعت گام برداری پرداخته شدهاست و در فاز آخر بستر نرمافزاری و هوشمندی منحصر به فرد ربات توسعه یافتهاست.
طراحی مکانیکی و کنترل
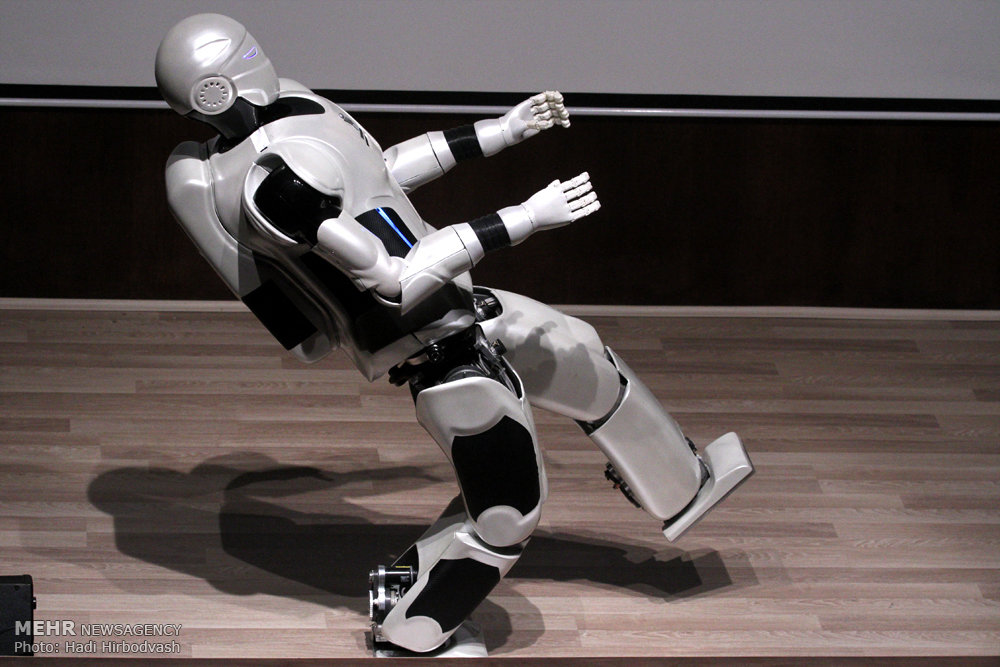
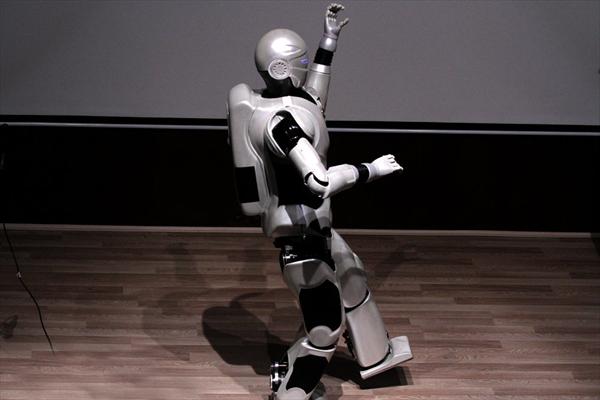
سورنا۳ یک ربات ۳۱ درجه آزادی است که ۱۲ درجه آزادی در بخش پاها، ۸ درجه در هر دست و ۲ درجه در سر دارد. بازه حرکتی و نرمی حرکت دستها در سورنا ۳ نسبت به سورنا ۲ که تنها ۴ درجه در هر دست داشت، ارتقای چشمگیری داشتهاست. این تغییرات سبب شدهاست که سورنا ۳ بتواند در بخش قابل توجهی از فضا دست خود را حرکت دهد و اجسام از پیش تعیین شده را بردارد. با توجه به افزایش قد قابل توجه ربات سورنا ۳ قدرت مورد نیاز برای موتورها و گشتاور وارده بر مفاصل افزایش زیادی یافتهاست که در نتیجه طراحی مکانیکی ربات را به یکی از چالش بر انگیزترین بخشها تبدیل کردهاست. تمام قطعات در نرمافزارهای مربوط طراحی شده اند و مقاومت و نوع جنس قطعات حساس محاسبه شدهاست. مفاصل و سیستم انتقال قدرت به عنوان مهمترین بخشهای طراحی مکانیکی با دقت مورد بررسی قرار گرفته اند و بر اساس سرعت و گشتاور مورد نیاز طراحی شدهاند. همچنین طراحی و ساخت پوسته ربات با توجه به قیود زیاد مکانیکی و ظاهر محنصر به فرد آن خود دارای چالشهای وسیعی بودهاست. سورنا ۳ میتواند چندین برابر سریعتر از نسل پیشین خود حرکت کند و از پله و سطح شیبدار هم بالا و پایین برود. حرکت چرخش درجا و با شعاع و همچنین حرکت رو به عقب و کنار نیز بر قابلیتهای ربات اضافه شدهاست. همچنین سورنا ۳ میتواند سطوح با ارتفاع متغیر را با سیستم حسگرهای خود تشخیص دهد و تعادل خود را بر روی این سطوح حفظ کند. سنسورهای IMU، میکروسوئیچ، انکودر مطلق و سنسور نیرو-گشتاور ۶ جهته بر روی ربات نصب شده اند و روشهای کنترلی پیشرفته و دقیقی برای حفظ تعادل ربات بر روی آن پیادهسازی شدهاست.

نرمافزار و الکترونیک
سورنا ۳ دارای یک ساختار الکترونیکی و نرمافزاری مختص خود است که نسبت به کنترل رفتار و حرکات ربات در تمامی سطوح کنترلی مسئول است. این ساختار پیچیده میتواند مقادیر سنسورها را بخواند، اجسام و علامتهای از پیش تعیین شده را تشخیص دهد، صورت و حرکات افراد را شناسایی نماید، صوت فارسی را تشخیص دهد، حرکات درخواستی از ربات را انجام دهد و در مورد حرکات ربات تصمیمگیری نماید. سورنا ۳ یک ربات هوشمند است که میتواند مسیر خود را بر اساس علامتهای موجود در مسیر تشخیص دهد. میتوان اشیای جدید را به ربات شناساند و در صورتی که ربات دوباره آن شی را ببیند میتواند آن را تشخیص دهد. ربات میتواند وضعیت ایستادن و حرکات دستهای انسان را تشخیص دهد و آن را تقلید نماید. سورنا ۳ میتواند صورت انسان را در تصویر تشخیص دهد، تعداد چهرهها را بشمارد و موقعیت آنها را اعلام نماید. یکی از قابلیتهای ویژه این ربات آنست که میتواند تعداد نامحدودی از جملات فارسی را که پیشتر به آن آموزش داده شدهاست را تشخیص دهد و صحبت نماید. تشخیص جملات فارسی در این ربات مستقل از گوینده بوده و جملات جدید را به راحتی میتوان از طریق نرمافزار تهیه شده برای ربات به آن آموزش داد. سورنا ۳ یک رابط کاربری گرافیکی مخصوص به خود دارد که از طریق آن میتواند به امتحان بخشهای مختلف پرداخت، سناریوهای مختلف را برای ربات ایجاد نمود و خطاهای بخشهای مختلف را ردیابی نمود. همچنین SDK طراحی شده برای ربات این امکان را برای کاربر فراهم میآورد که بتواند از طریق کتابخانههای مختلفی که برای هر بخش حرکتی یا هوشمندی ربات تهیه شدهاست به برنامهریزی ربات بپردازد. چندین مدار مختلف الکتریکی برای سورنا ۳ طراحی شدهاست. فرمان صحیح و به موقع به موتورها و یکپارچهسازی آنها، خواندن سنسورها و ارسال دادههای آن به لایه نرمافزاری و همچنین فراهم کردن توان مورد نیاز برای تغذیه ایمن بخشهای مختلف از جمله وظایف مدارهای الکترونیکی ربات است. این مدارات به شکل کامل در مرکز سیستمها و فناوریهای پیشرفته دانشگاه تهران طراحی شدهاست.
| مشخصات فنی | سورنا3 |
|---|---|
| حرکت مستقیم | سرعت 0/7 km تا 10 گام |
| حرکت روی سطح شیب دار و پله | بالا رفتن و پایین آمدن از پله (5 سانتی متر) و سطح شیبدار (10 درجه) |
| چرخیدن | چرخیدن درجا و با هر شعاع دلخواه |
| حرکت رو به عقب | دارد |
| راه رفتن روی سطوح ناهموار | نسبت به اختلاف ارتفاع سطح پایدار است |
| بینایی | تشخیص شی، صورت، موقعیت بالا تنه و پایین تنه و توانایی دنبال کردن صورت |
| شنوایی | تشخیص کلمات و جملات از پیش تعیین شده به زبان فارسی |
| تکلم | استفاده از تعداد نا محدود کلمه و جمله در قالب سناریو هوشمند |
| نرمافزار کاربر | SDK، محیط گرافیکی برای کنترل سامانه، مشاهده خروجی سنسورها و تست الگوریتمهای هر بخش |
| برداشتن و تحویل اشیا | قابلیت برداشتن اشیا با قطر حداکثر 6.5mm و وزن 200g |
| حرکات نمایشی | شوت کردن توپ با قطرهای متفاوت و انجام حرکات نمایشی |
 |
 |
 |
 |
 |
 |